熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


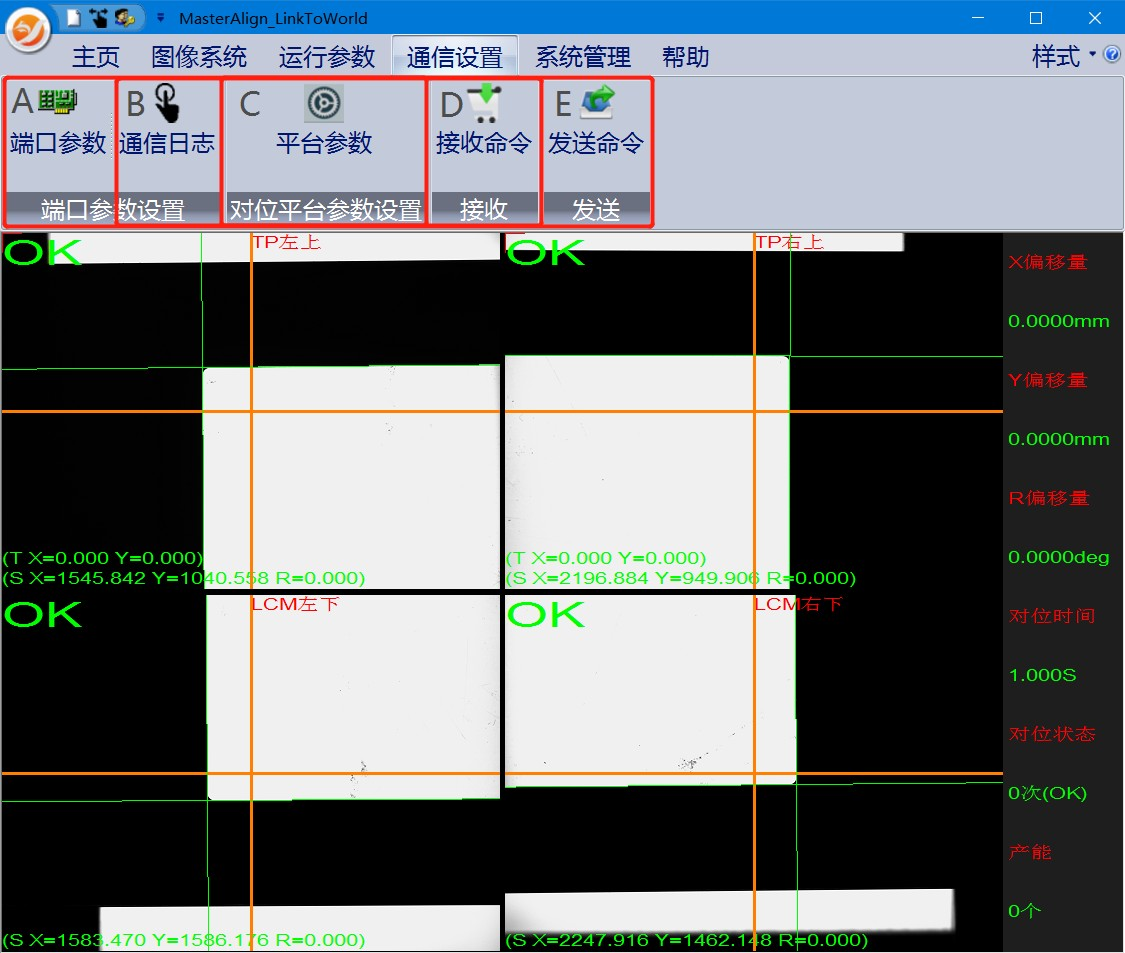
A. 端口參數:設置通訊端口相關參數,測試通訊協議。
B. 通訊日志:記錄通訊收發數據記錄
C. 平臺參數:設置對位平臺相關參數
D. 接收命令:接收命令界面相關參數操作和查閱
E. 發送命令:發送命令界面相關參數操作和查閱
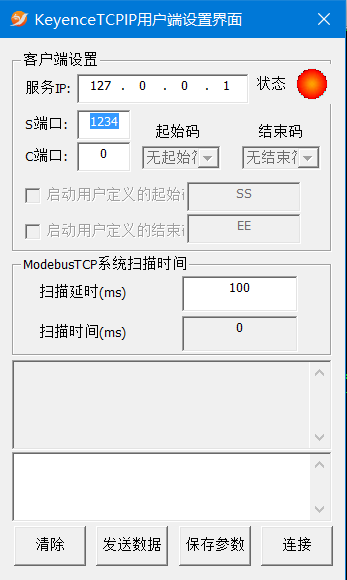
用戶端設置界面
在“通信設置”->點擊“端口參數”,彈出端口參數設置界面。
針對不同的通訊方式,設置不同,這部分一般由供應商來設置。其中掃描時間代表通訊的周期時間。
通訊的方式以及資料保存文檔都在軟件的根目錄下“SYCommunicateFile” 文件夾中,如果文件夾內沒有文檔,則打開運行軟件會提示選擇通訊方式,如下圖所示:
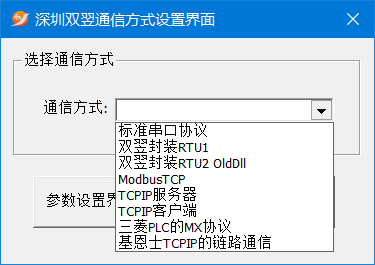
如上圖圖所示,系統集成了多種通訊方式,大大方便了客戶的選擇使用。
在軟件的根目錄下“SYCommunicateFile”中生成的通訊文檔,如下圖所示:(注釋:文檔名稱標準格式為 XX_00.SYCommunicateFile,如下圖 A 文檔符合名稱定義,因此系統加載此通信方式)
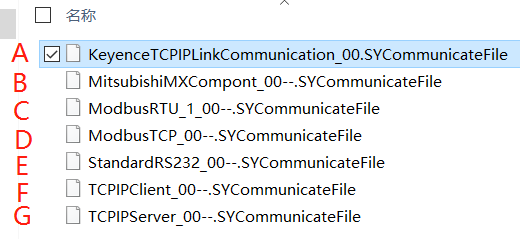
A. 基恩士 TCPIP 的鏈路通訊端口設置界面:
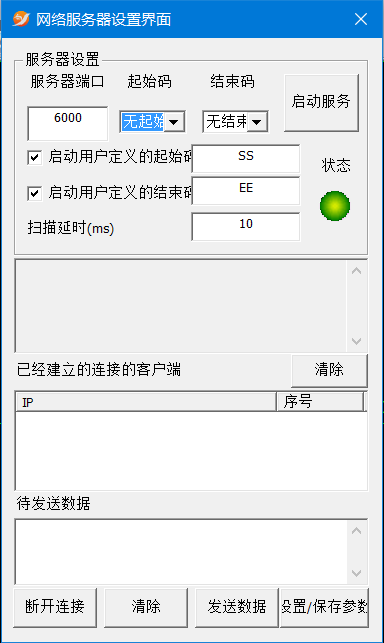
B. TCP/IP 服務器(視覺優先考慮做服務器)通訊端口設置界面:
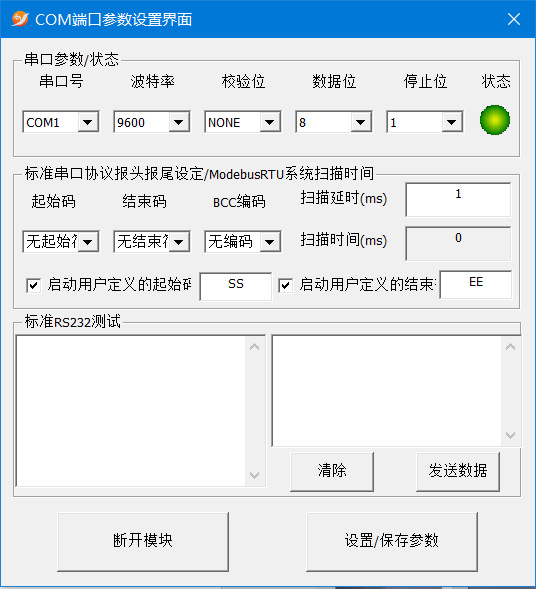
C. Modbus RTU (串口)(視覺做主站)通訊端口設置界面:
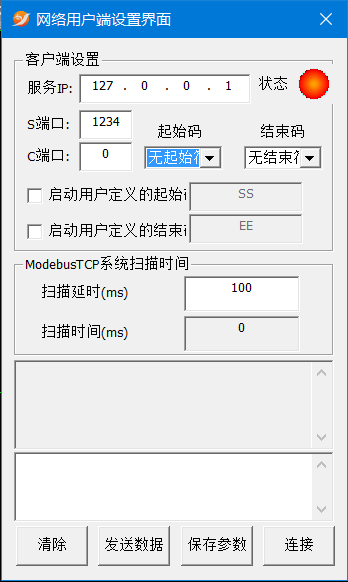
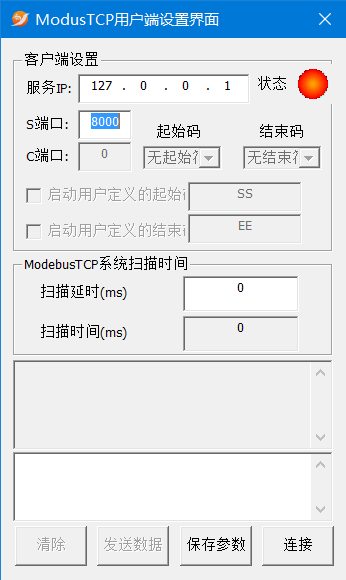
D. TCP/IP 用戶端通訊端口設置界面:
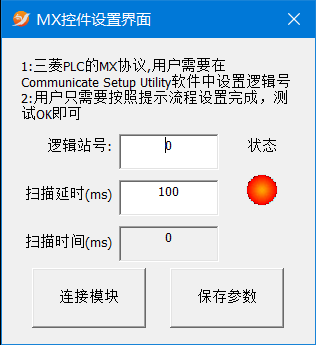
E. 三菱 PLC 的 MX (目前支持 32 位,不支持 64 位系統)通訊端口設置界面:
(三菱通訊設置方法詳見“三菱 MX 控件安裝以及設置方法”文件)
F. Modbus TCP (網口)通訊端口設置界面:
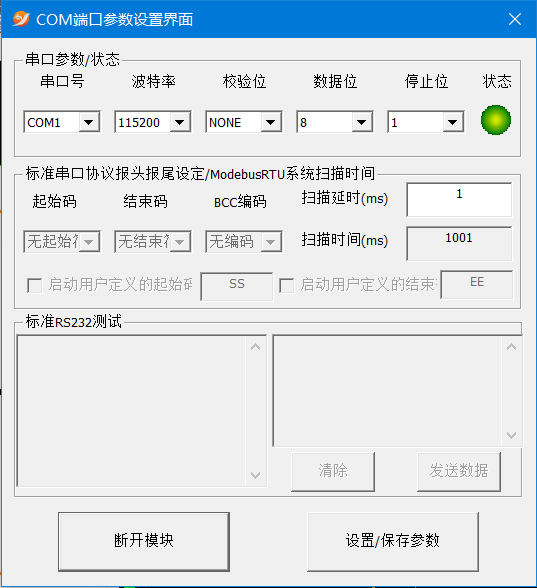
G. 標準串口協議通訊端口設置界面:
通信信息記錄界面
在“通信設置”->點擊“通信日志”,彈出通信日志顯示界面,如圖所示:
在“通信設置”->點擊“平臺參數”,彈出平臺參數設置界面,如圖所示:
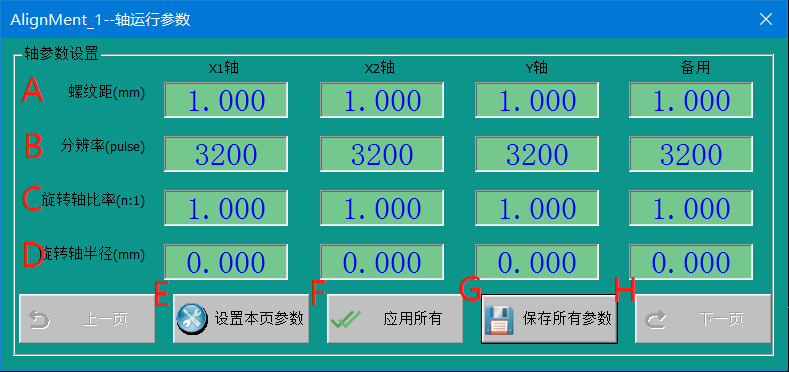
A. 螺紋距:每個軸對應絲桿的螺紋距,即絲桿旋轉一圈前進的距離;
B. 分辨率:每個軸對應驅動器的分辨率,即旋轉一圈需要的脈沖數量;
C. 旋轉軸比率:每個軸對應的減速機比率,例如加了 1:10 的減速機,那邊這個值就設置為 10,這樣代表電機轉一圈的脈沖是 10 倍的分辨率;
D. 旋轉軸半徑:旋轉電機的半徑;
E. 設置本頁參數:將本頁的數值輸入框的數值賦予給系統相應的變量,但不保存文件中;
F. 應用所有:將首列(即上圖 X1 軸)的所有參數設置賦予給后續 3 列;
G. 保存所有參數:將本頁所有設置的數值保存在文件中。以下是四種典型對位平臺參數設置方法:
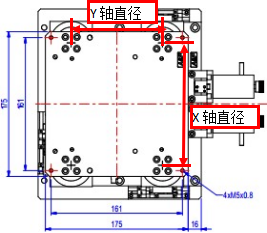
1. XXY/UVW 平臺(長方形對位平臺):
a. 螺紋距參數就填寫對應軸的螺紋距;
b. 分辨率參數就填寫對應軸的分辨率;
c. 旋轉軸比例參數就填寫對應軸的減速機比率,如果沒有減速機就填“0”;
d. 旋轉軸半徑參數為圖片中紅色標記的數據,X 軸和 Y 軸半徑不同, 如圖所示;
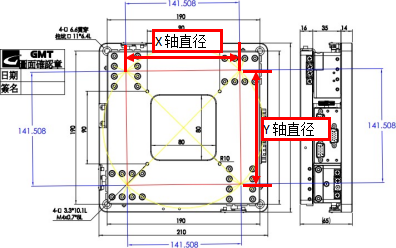
2. XXY/UVW 平臺(正方形對位平臺):
a. 螺紋距參數就填寫對應軸的螺紋距;
b. 分辨率參數就填寫對應軸的分辨率;
c. 旋轉軸比例參數就填寫對應軸的減速機比率,如果沒有減速機就填“1”;
d. 旋轉軸半徑參數為圖片中紅色標記的數據,X 軸和 Y 軸半徑相同,如圖所示:
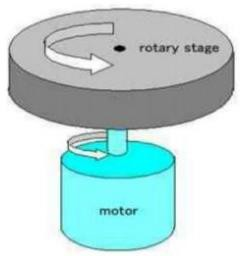
3. XYR 平臺(旋轉軸為直驅):
a. 螺紋距參數就填寫對應軸的螺紋距;
b. 分辨率參數就填寫對應軸的分辨率;
c. 旋轉軸比例參數就填寫對應軸的減速機比率,如果沒有減速機就填 1;
d. 旋轉軸半徑參數就填寫 0,如圖所示:
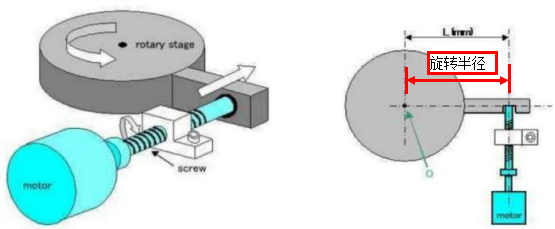
4. XYR 平臺(側推):
a. 螺紋距參數就填寫對應軸的螺紋距;
b. 分辨率參數就填寫對應軸的分辨率;
c. 旋轉軸比例參數就填寫對應軸的減速機比率,如果沒有減速機就填 1;
d. 旋轉軸半徑參數為圖片中紅色標記的數據, 如圖所示:
接收命令編輯設置界面
在“通信設置”->點擊“接收命令”,彈出接收命令設置界面,如圖
3.6.4.1 /.2/.3 所示:(注釋:下圖為 Modbus 為例)

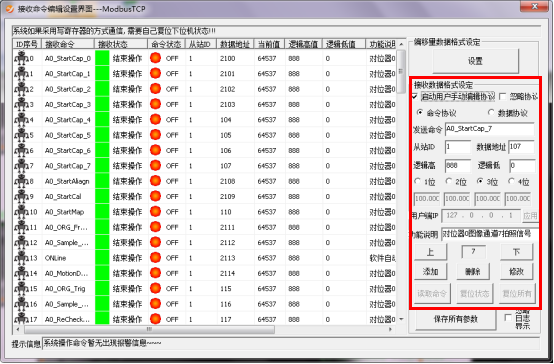
指令 ID 序列號:此 ID 為系統定義的信號序號,不可以修改;
接收命令:此項可以根據需求改變,此項主要用于編輯 TCPIP 通訊發送的字符串協議內容;
接收狀態:綠色為接收完成,黃色為正在接收中,紅色為正在復位中;
命令狀態:紅燈 OFF 為正在接收到命令中,綠色 ON 為已接收到命令;
從站 ID:為 PLC 的站號;
數據地址:為 PLC 的數據寄存器地址,可根據 PLC 寄存器地址進行編輯;
當前值:當前讀取 PLC 對應數據寄存器的值;
邏輯高值:為命令協議信號有效;
邏輯低值:為命令協議信號無效;
功能說明:為該命令的功能詳細備注說明;
啟動用戶手動編輯協議:通過勾選“啟動用戶手動編輯協議”后就可以修改命令協議和數據協議的關鍵字、數據地址、功能詳細說明。也可以操作對應地址讀取寄存器數值,復位寄存器數值,以及復位所有寄存器數值,退出界面時,需要將 “啟動用戶手動編輯協議”的狀態置為不勾選;
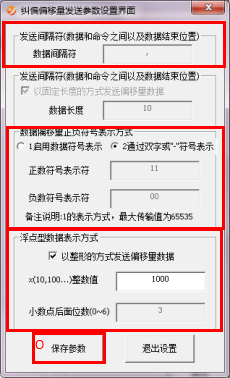
發送間隔符:視覺系統發送偏移量 X,Y,R 數據中間的分隔符“;”,可以修改;
1.格式為兩個寄存器表達一組數據,第一個寄存器存放正負號,“11”代表正,“00”代表負。第二個寄存器存放數據,可以存放 16 位數據,范圍是-2^16~2^16;
2.雙字,格式為兩個寄存器表達一組數據,兩個寄存器合并這樣就可以存放 32 位數據,范圍是-2^32~2^32。
N. 浮點型數據表示方式:發送數據選擇以整型數據或者浮點型數據發送, 如果勾選以整型數據發送,視覺系統會以發送數據×1000 倍后發送給PLC,因為視覺計算的偏移量數據是保存小數點后 3 位;
O. 保存參數:設置完參數后點擊該按鈕進行保存參數。
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
